Method of Solution¶
The flow and heat equations (Modes: RICHARDS, MPHASE, FLASH2, TH, …) are solved using a fully implicit backward Euler approach based on Newton-Krylov iteration. Both fully implicit backward Euler and operator splitting solution methods are supported for reactive transport.
Integrated Finite Volume Discretization¶
The governing partial differential equation for mass conservation of primary species \(j\) can be written in the general form
with accumulation \(A_j\), flux \({\boldsymbol{F}}_j\) and source/sink \(Q_j\). Integrating over a REV corresponding to the \(n\)th grid cell with volume \(V_n\) yields
The accumulation term has the finite volume form
with time step \(\Delta t\). The flux term can be expanded as a surface integral using Gauss’ theorem
where the latter finite volume form is based on the two-point flux approximation, where the sum over \(n'\) involves nearest neighbor grid cells connected to the \(n\)th node with interfacial area \(A_{nn'}\). The discretized flux has the form for fluid phase \({{\alpha}}\)
with perpendicular distances to interface \(nn'\) from nodes \(n\) and \(n'\) denoted by \(d_{n'}\) and \(d_n\), respectively. Upstream weighting is used for the advective term
Depending on the type of source/sink term, the finite volume discretization has the form
for reaction rates that are distributed continuously over a control volume, or for a well with point source \(Q_j = \hat Q_j \delta({\boldsymbol{r}}-{\boldsymbol{r}}_0)\):
Two Point Flux Approximation¶
The figure below illustrates the implementation of two point fluxes through Eqs (4) and (5) above.
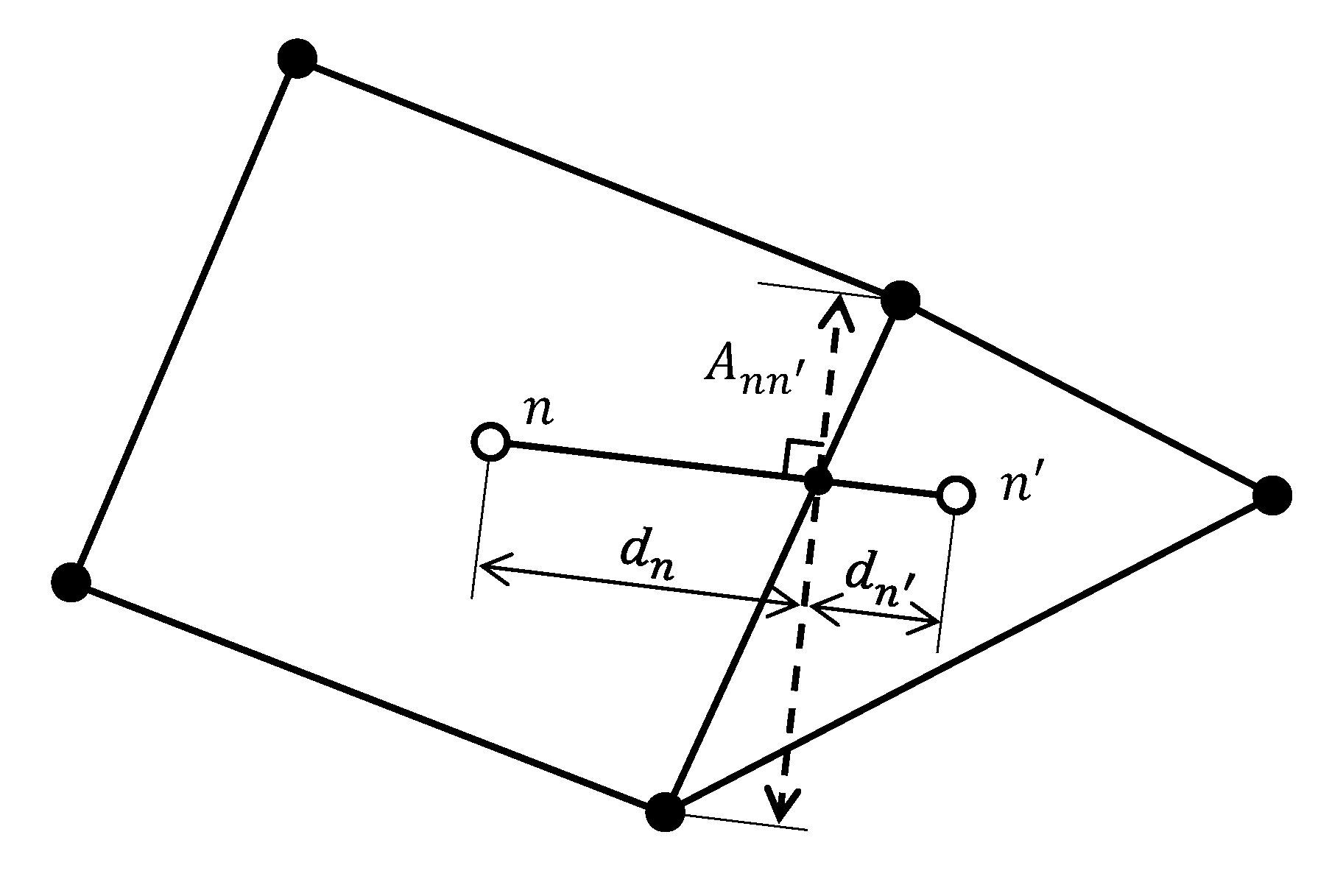
Schematic of two point flux approximation geometry for two unstructured grid cells.¶
The dashed line represents \(A_{nn'}\), the area of the face projected onto the plane that is normal to the vector connecting cells \(n\) and \(n'\). \(d_{n'}\) and \(d_n\) are the distances on either side of the projected face.
When converting an implicit unstructured grid (defined by elements and vertices) with non-orthogonal faces between cells to an explicit unstructured grid format where connection face areas are assumed to be orthogonal to the connecting vector, the user must project the face area onto the orthogonal plane. In other words, the connection areas defined by the explicit unstructured grid format are assumed to be \(A_{nn'}\).
Projection and Averaging of Anisotropic Permeability Tensors¶
Anisotropic permeabilities are assigned with a diagonal or full tensor prescribed for each grid cell. For flux calculations, each cell’s permeability tensor is projected onto the unit vector \(u\) connecting the cell centers. The tensor (projection) can be weighted linearly:
in the direction of flow:
or in the direction of the potential gradient:
Assuming a 2D permeability tensor
with \(k_{xx}\) = 1e-12, \(k_{yy}\) = 2e-12, and \(k_{xy}\) = \(k_{yx}\) = 0, the figure below illustrates how these weighting functions impact the resulting scalar permeability \((k)\) calculated for each cell on either side of the flux calculation. The angle \(\theta\) describes the orientation of \(u\) where for 0, \(u\) points in the x-direction and for \(\frac{\pi}{2}\), \(u\) points in the y-direction. This example clearly illustrates how linear weighting should only be used for orthogonal Cartesian grids.
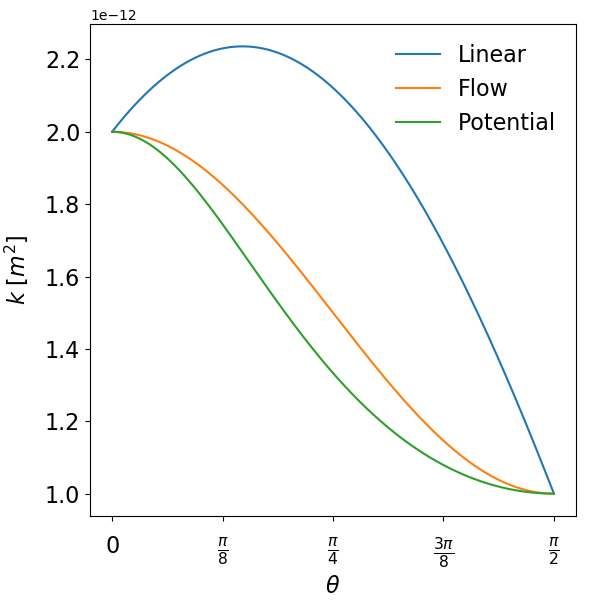
In all cases, the resulting projected scalar permeabilities on either side of the face are distance-weighted, harmonically averaged:
Global Implicit Newton-Raphson Linear and Logarithmic Update¶
In a fully implicit formulation the nonlinear equations for the residual function \({\boldsymbol{R}}\) given by
are solved using an iterative solver based on the Newton-Raphson equations
at the \(i\)th iteration. Iteration stops when
or if
However, the latter criteria does not necessarily guarantee that the residual equations are satisfied. The solution is updated from the relation
For the logarithm of the concentration with \({\boldsymbol{x}}=\ln{\boldsymbol{y}}\), the solution is updated according to
or
Example¶
To illustrate the logarithmic update formulation the simple linear equation
is considered. The residual function is given by
with Jacobian
In the linear formulation the Newton-Raphson equations are given by
In the logarithmic formulation the Jacobian is given by
and the Newton-Raphson equations are now nonlinear becoming
with the solution update
or
It follow that
with the solution
and thus
Given that a solution \(x\) exists it follows that
Multirate Sorption¶
The residual function incorporating the multirate sorption model can be further simplified by solving analytically the finite difference form of kinetic sorption equations. This is possible when these equations are linear in the sorbed concentration \(S_{j{{\alpha}}}\) and because they do not contain a flux term. Thus discretizing Eqn. (130) in time using the fully implicit backward Euler method gives
Solving for \(S_{j{{\alpha}}}^{t+\Delta t}\) yields
From this expression the reaction rate can be calculated as
The right-hand side of this equation is a known function of the solute concentration and thus by substituting into Eqn. (129) eliminates the appearance of the unknown sorbed concentration. Once the transport equations are solved over a time step, the sorbed concentrations can be computed from Eqn. (34).
Operator Splitting¶
Operator splitting involves splitting the reactive transport equations into a nonreactive part and a part incorporating reactions. This is accomplished by writing Eqns. (1) as the two coupled equations
and
The first set of equations are linear in \(\Psi_j\) (for species-independent diffusion coeffients) and solved over over a time step \(\Delta t\) resulting in \(\Psi_j^*\). The result for \(\Psi_j^*\) is inverted to give the concentrations \(C_j^*\) by solving the equations
where the secondary species concentrations \(C_i^{*}\) are nonlinear functions of the primary species concentrations \(C_j^{*}\). With this result the second set of equations are solved implicitly for \(C_j\) at \(t+\Delta t\) using \(\Psi_j^*\) for the starting value at time \(t\).
Constant \(K_d\)¶
As a simple example of operator splitting consider a single component system with retardation described by a constant \(K_d\). According to this model the sorbed concentration \(S\) is related to the aqueous concentration by the linear equation
The governing equation is given by
If \(C(x,\,t;\, {\boldsymbol{q}},\,D)\) is the solution to the case with no retardation (i.e. \(K_d=0\)), then \(C(x,\,t;\, {\boldsymbol{q}}/R,\,D/R)\) is the solution with retardation \((K_d>0)\), with
Thus propagation of a front is retarded by the retardation factor \(R\).
In operator splitting form this equation becomes
and
The solution to the latter equation is given by
where \(C^*\) is the solution to the nonreactive transport equation. Using Eqn. (39), this result can be written as
Thus for \(R=1\), \(C^{t+\Delta t}=C^*\) and the solution advances unretarded. As \(R\rightarrow\infty\), \(C^{t+\Delta t} \rightarrow C^t\) and the front is fully retarded.